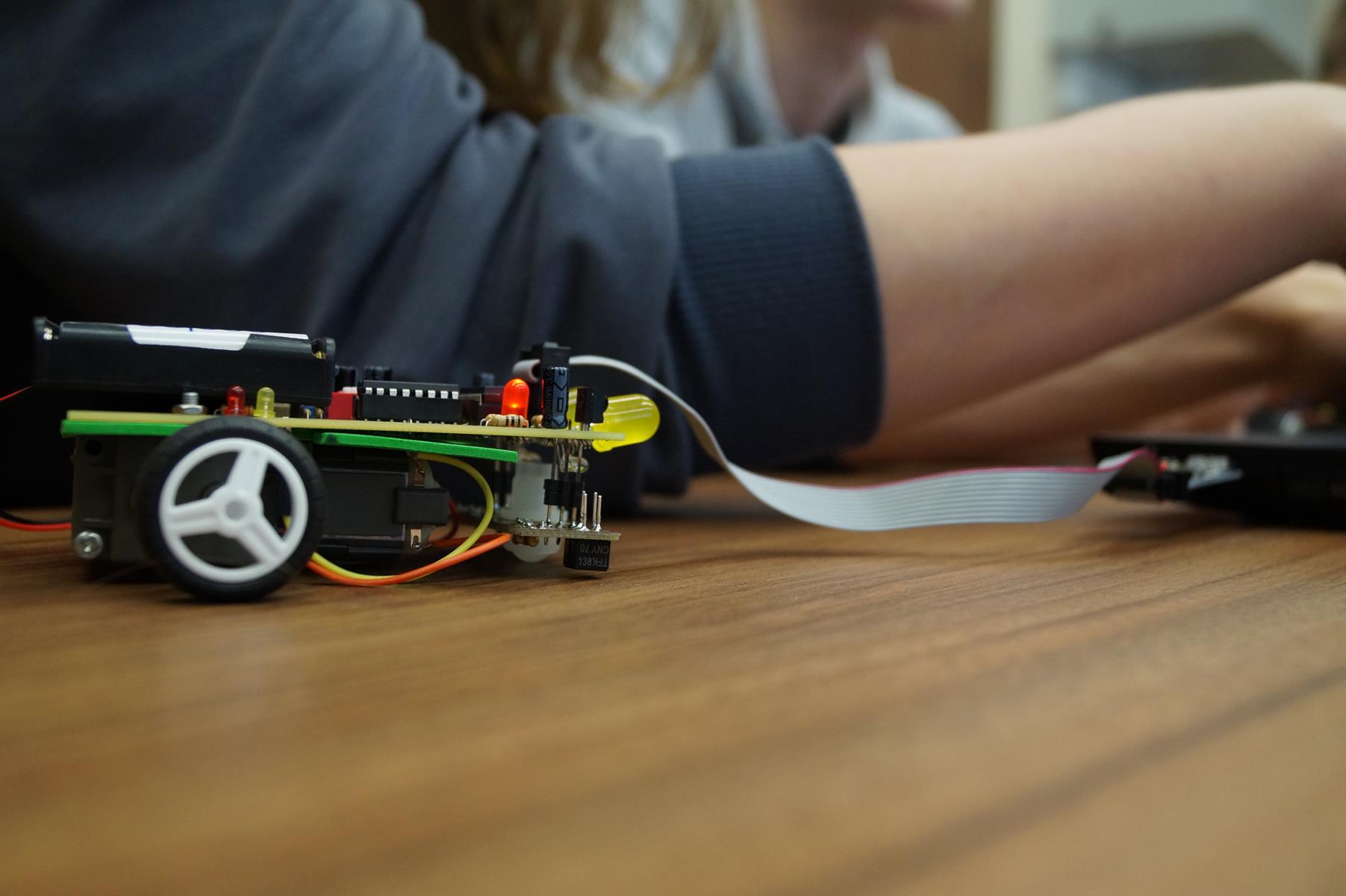
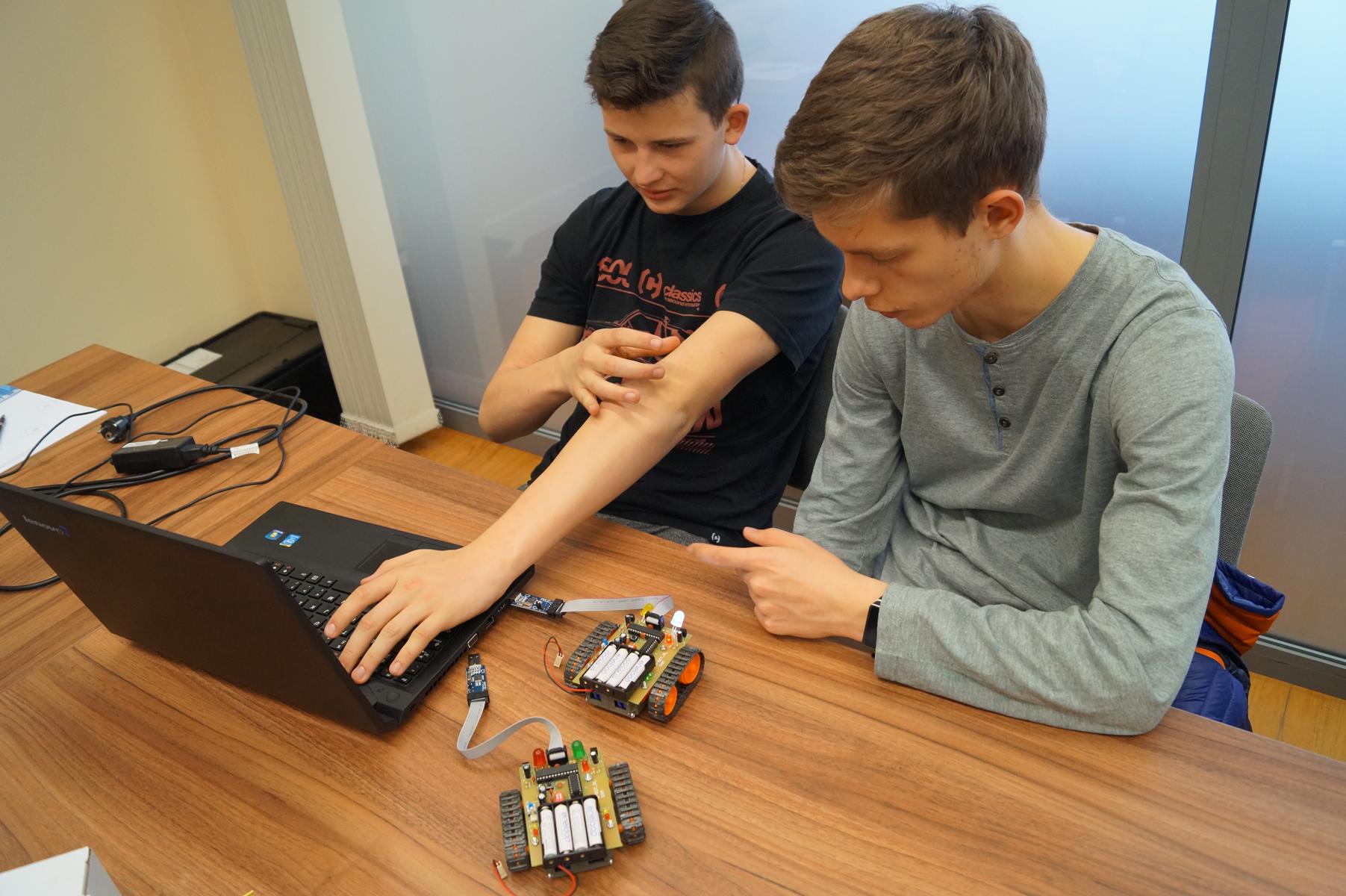
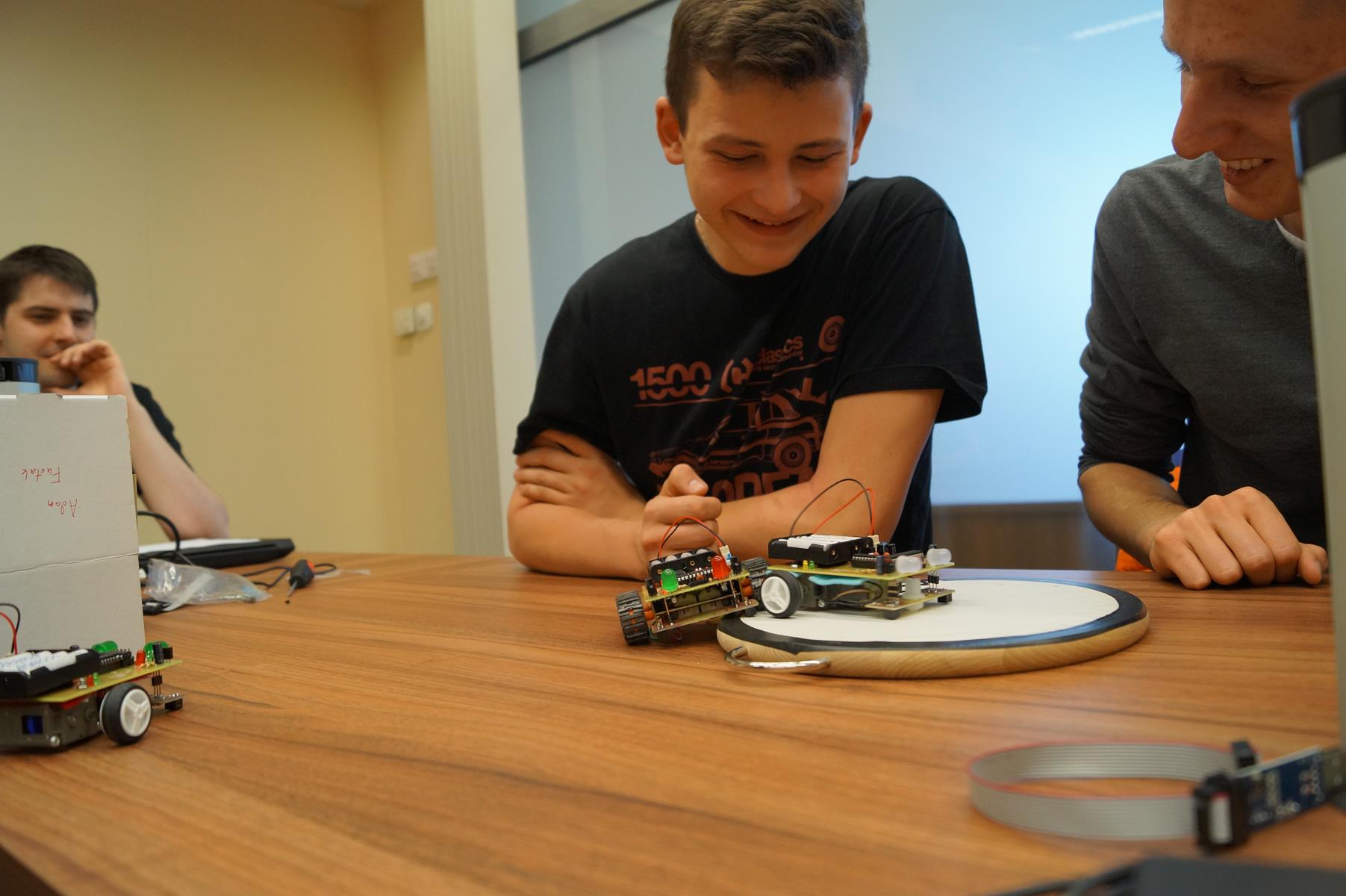
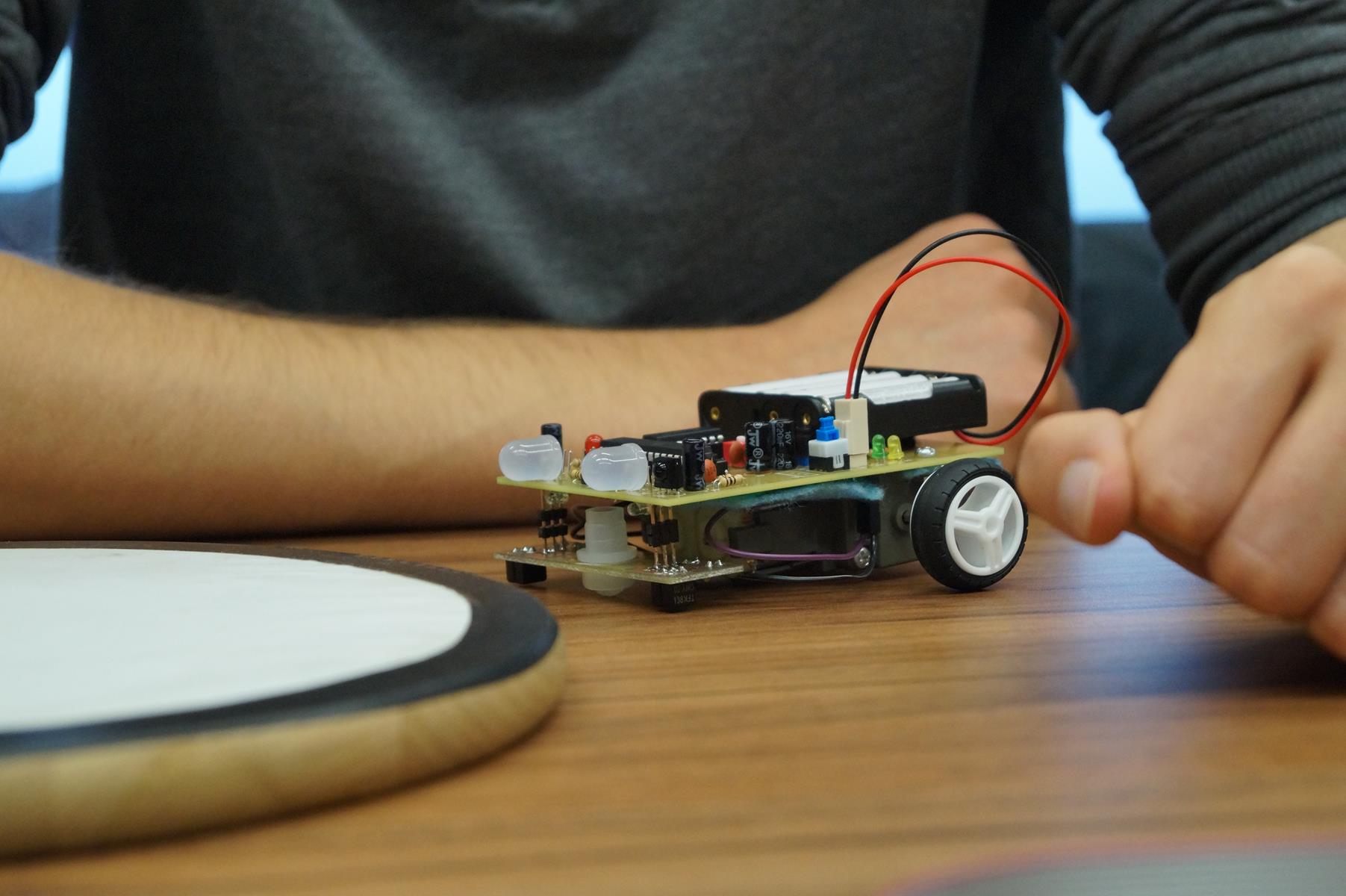
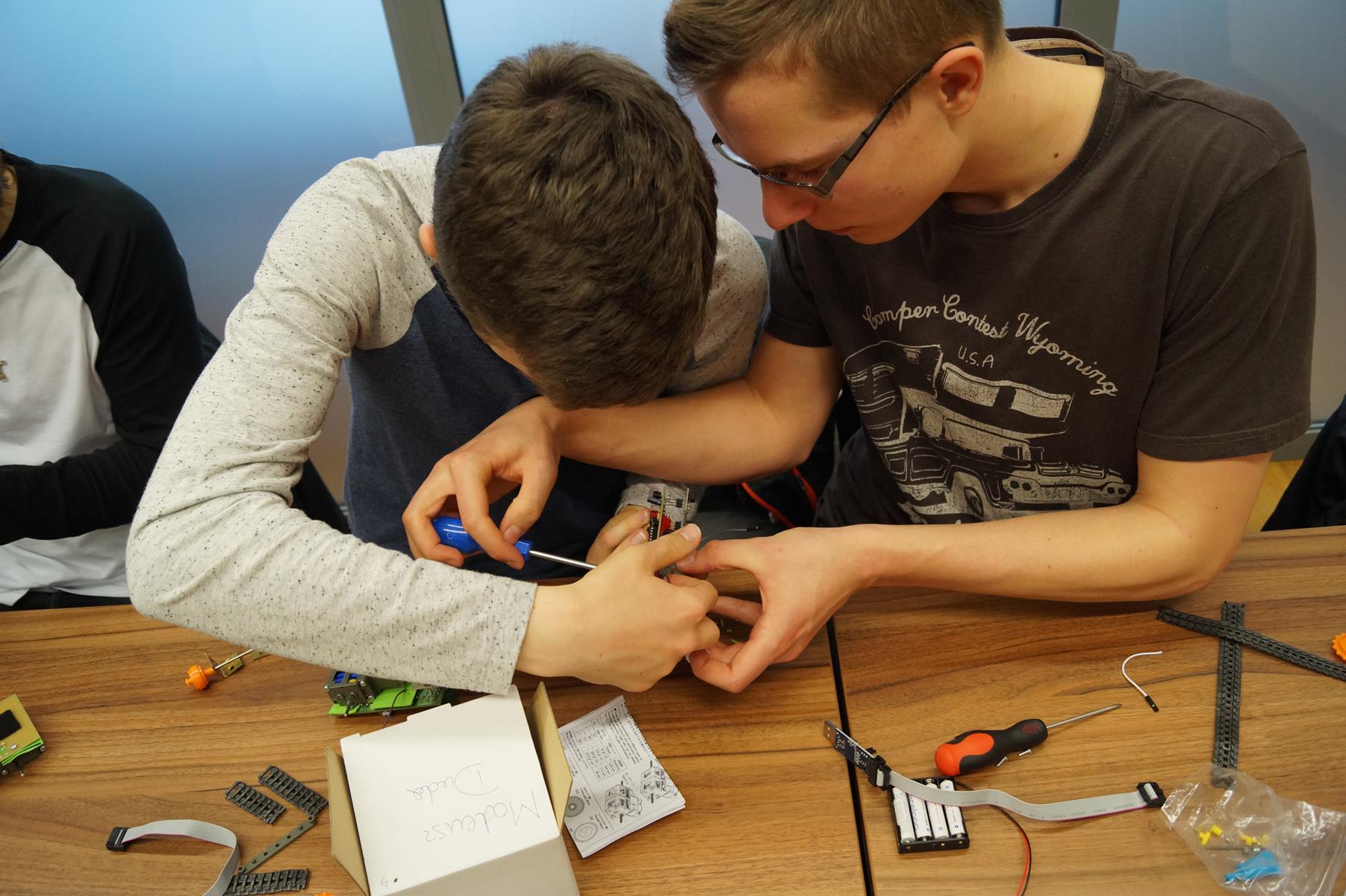
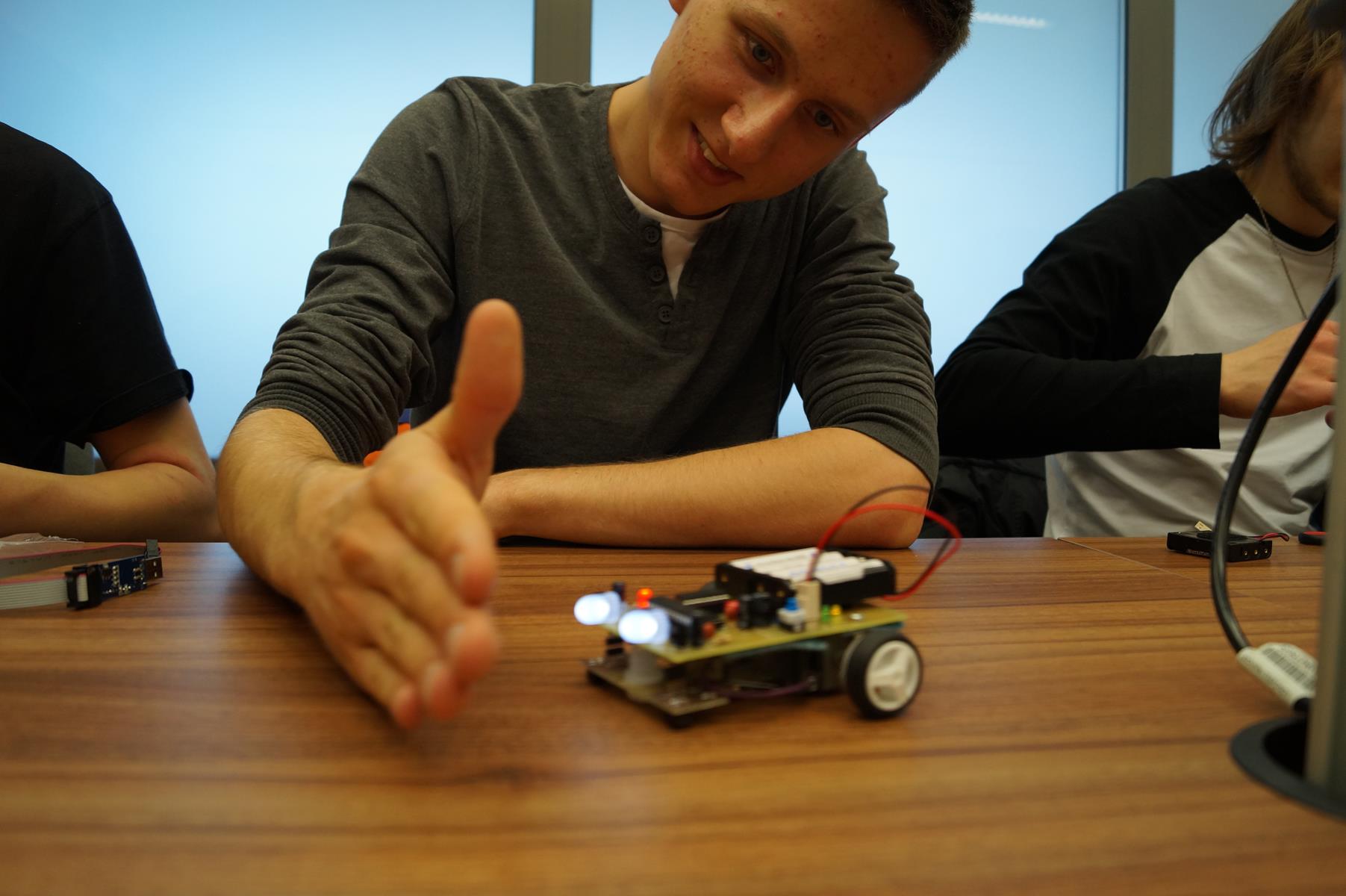
Ostatni wyjazd do Wrocławia i ostatnie prace przy budowie robota. Połączenie wszystkich elementów robota, ostatnie poprawki i sprawdzenie poprawności wykonania. Robot zaprogramowany został w czterech trybach:
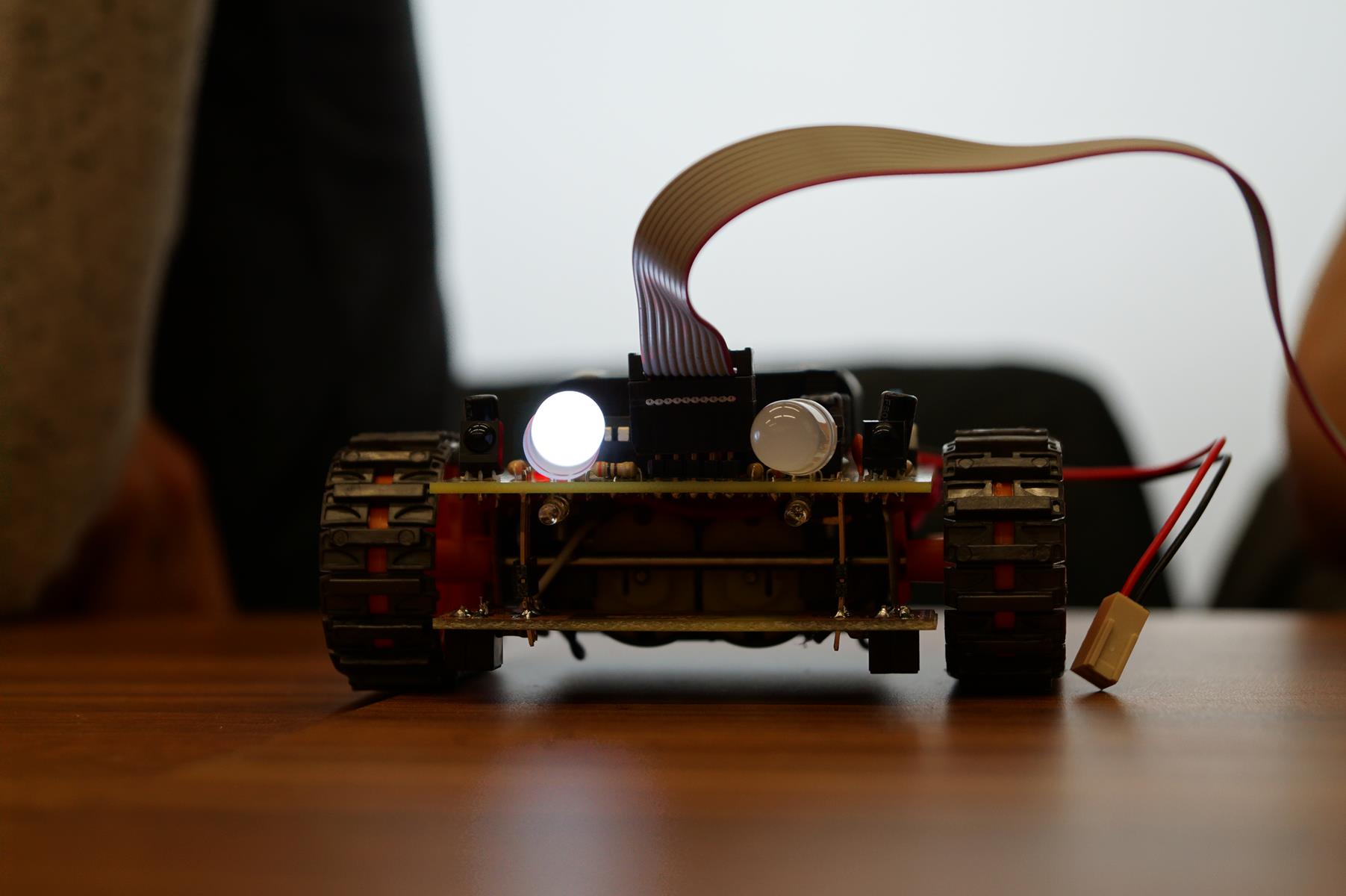
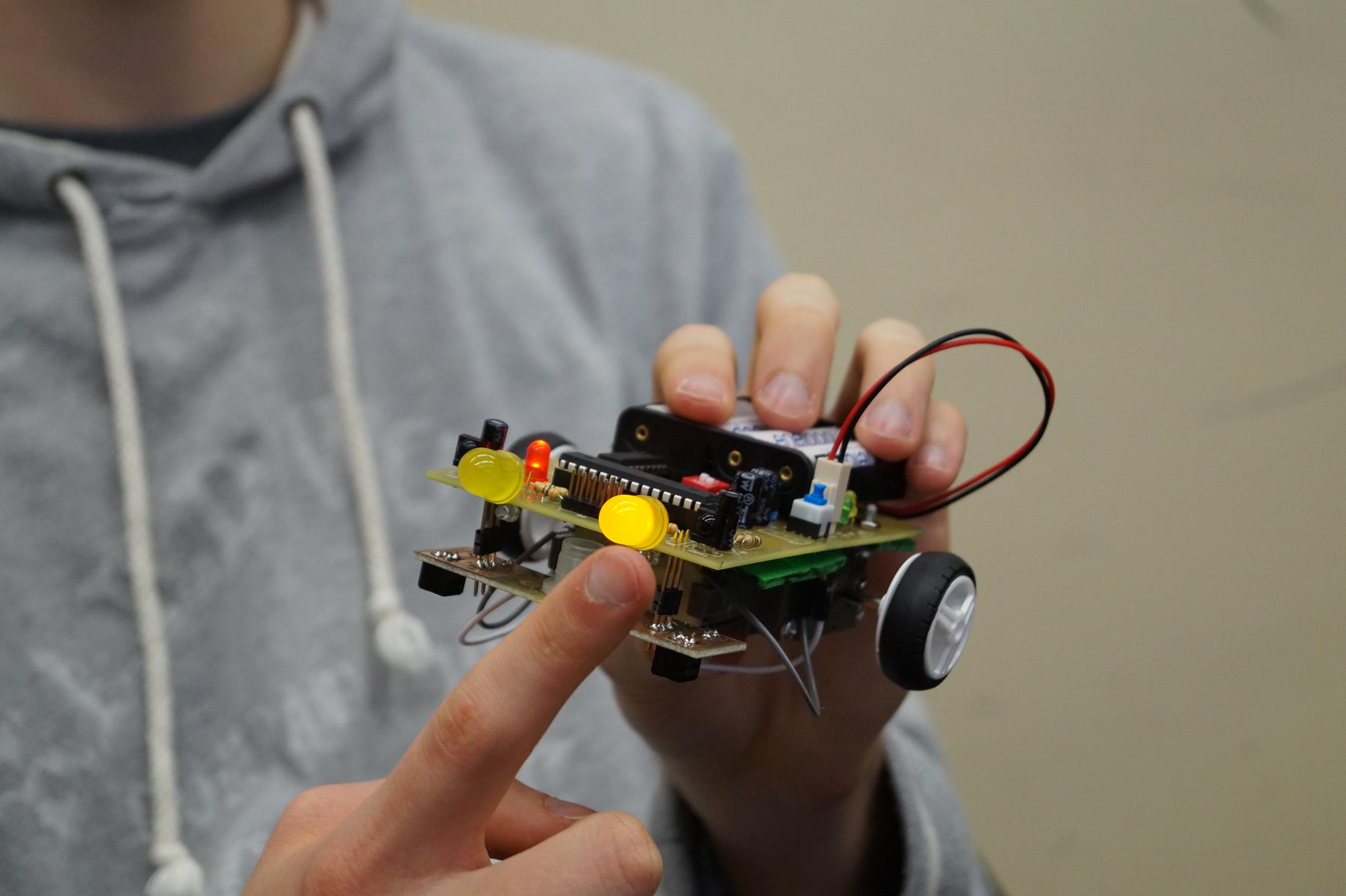
- Podążanie za ruchem ręki – zasłaniając lewą diodę jedzie w lewo, zasłaniając prawą diodę jedzie w prawo, zasłaniając obie diody jedzie do przodu.
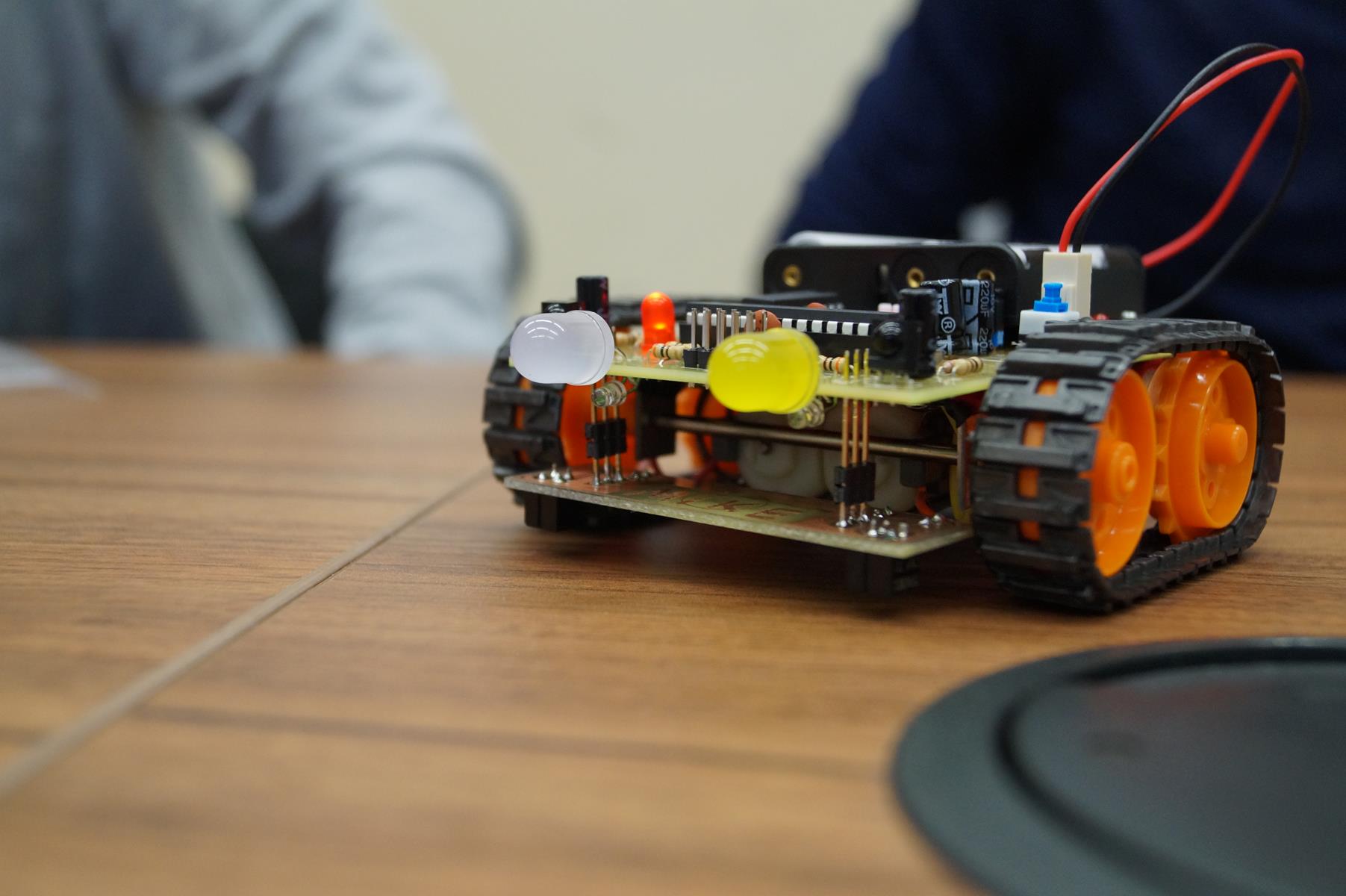
- Tryb sumo – wyszukuje przeciwnika i próbuje go wypchać poza wyznaczony obszar.
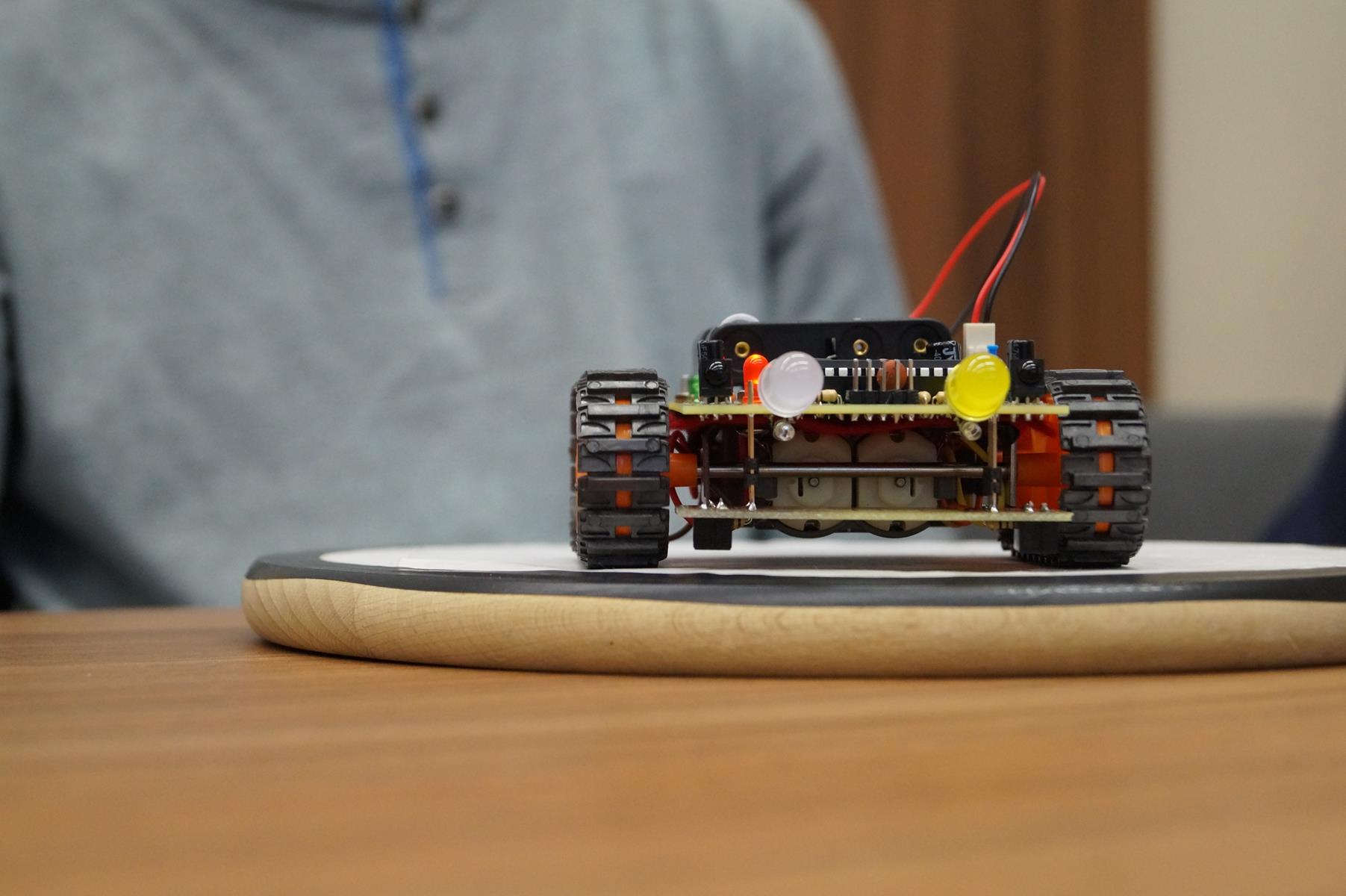
- Podążanie torem białej linii – po naklejeniu na płaską powierzchnię białej taśmy robot trzyma się tej linii dzięki czujnikowi zamontowanemu w podwoziu.
- Unikanie krawędzi – robot utrzymuje się na blacie stołu unikając spadnięcia.
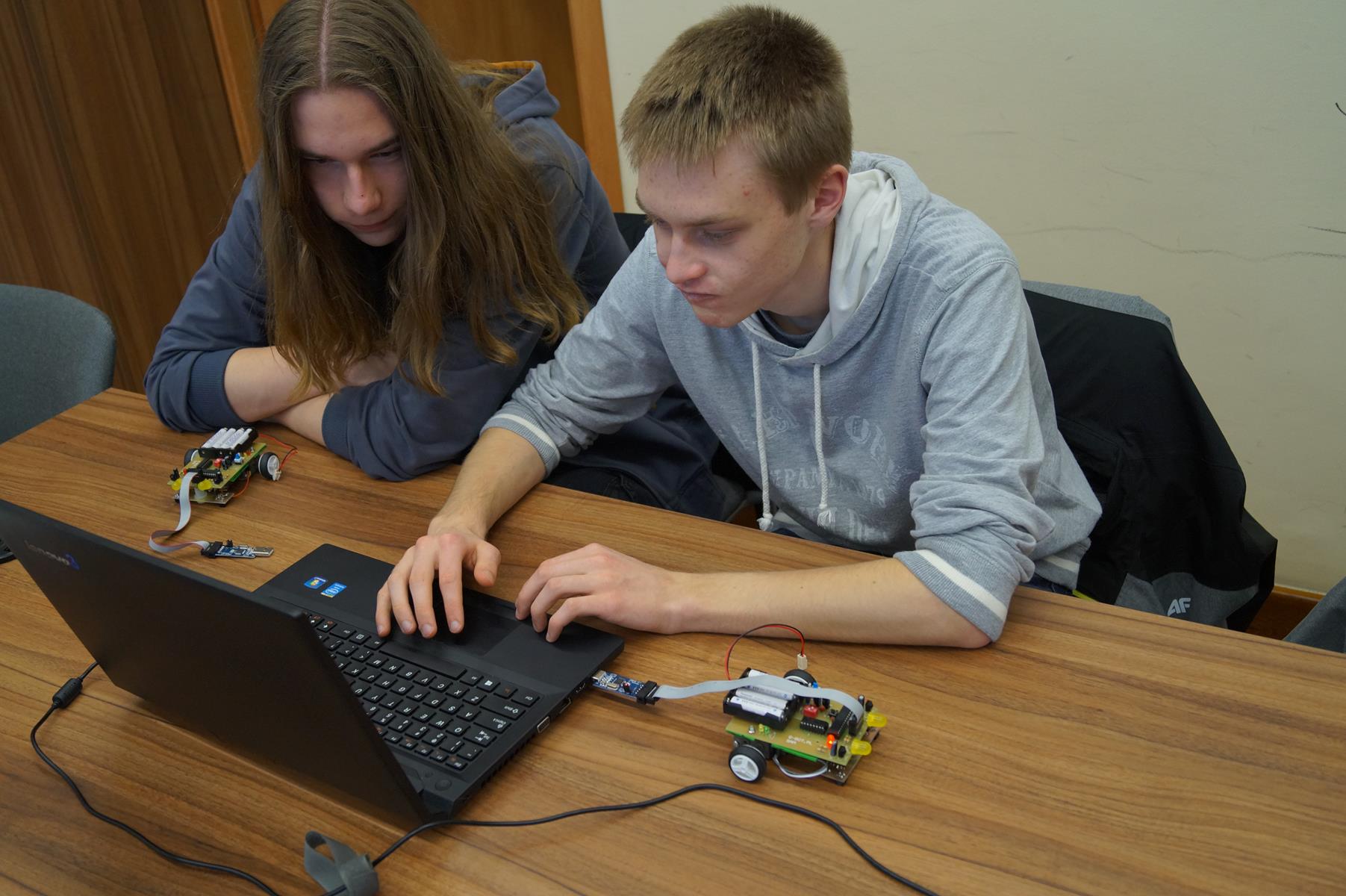
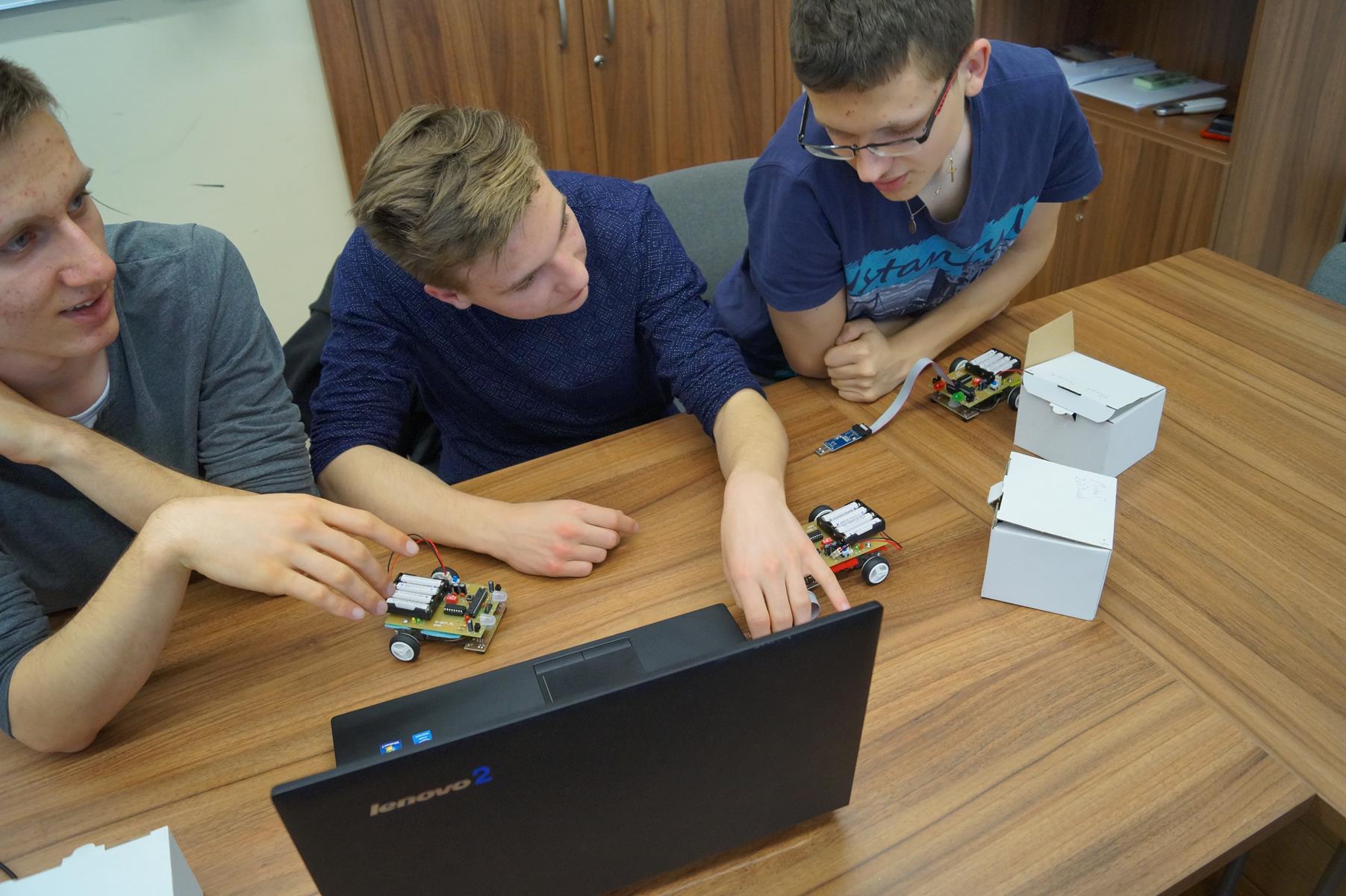
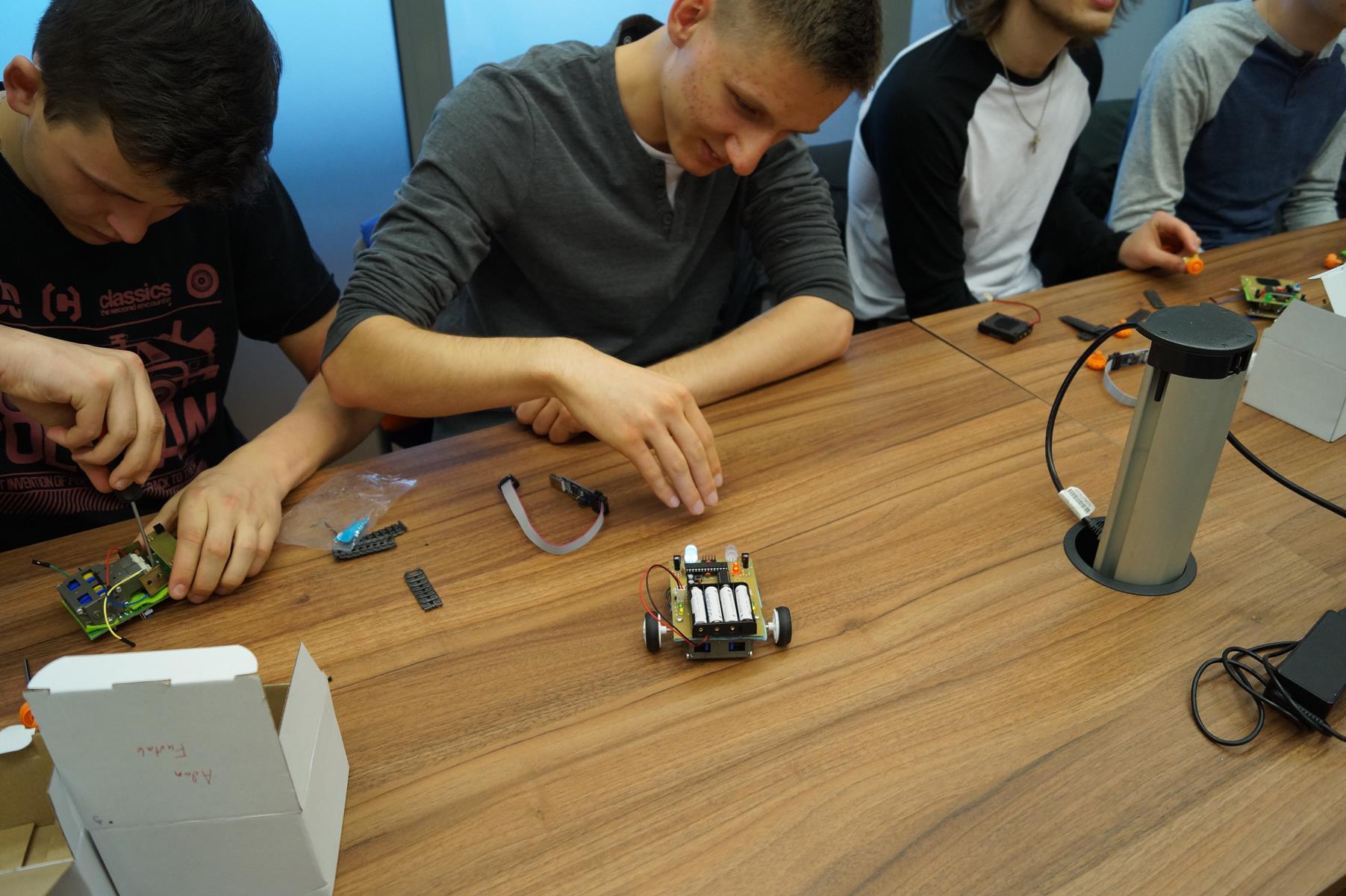
Po sprawdzeniu wszystkich trybów, instruktorzy zaprezentowali środowisko programistyczne. Następnie uczniowie przystąpili do programowania robotów zmieniając podstawowe ustawienia.
Po zakończeniu zajęć uczniowie otrzymali zbudowane przez siebie roboty, gdzie już samodzielnie będą mogli je rozwijać, pisząc własne programy sterujące robotem.
Zajęcia były doskonałą okazją, aby poznać różne zagadnienia techniczne, rozwijać kreatywność i umiejętność logicznego myślenia przekonać się, że przedmioty ścisłe wcale nie są nudne.